从零开始制作魔方机器人(二)机械组装部分
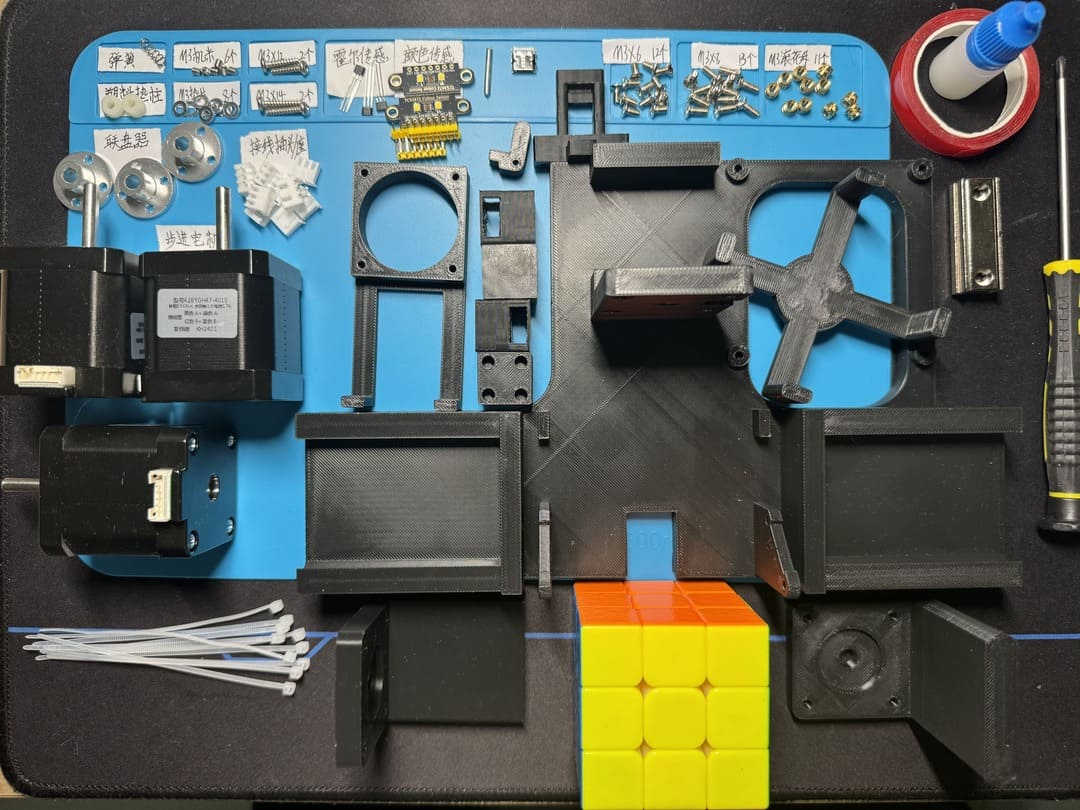
魔方机器人的主体架构是3D打印的,材料为Abs,我是从闲鱼平台上找人打印的,费用八十多元。机械部分所用散件如下

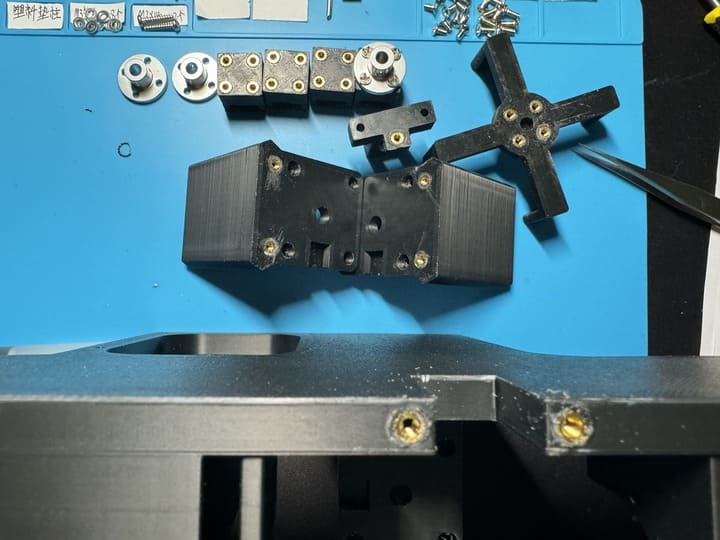
1.安装滚花螺母。将滚花螺母放到对应孔处,用电烙铁加热滚花螺母烫化Abs材料以压入孔中,趁热用镊子后端压平,等Abs材料硬化后用锉刀打磨平整。
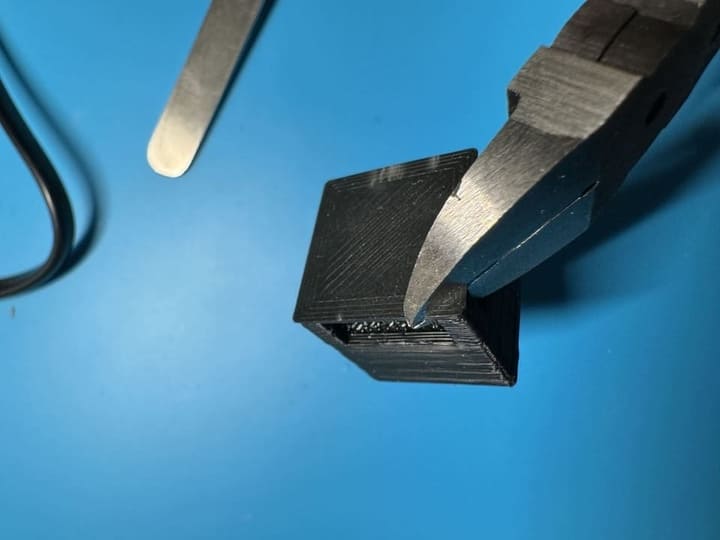
2.用M3x8螺丝连接法兰联轴器和爪子模型,用水口钳剪掉多余部分(多余部分是3D打印支撑部分),用锉刀打磨四个脚到能够插入魔方并夹住,用502加固(四个脚很脆弱,一不小心就会掉)。



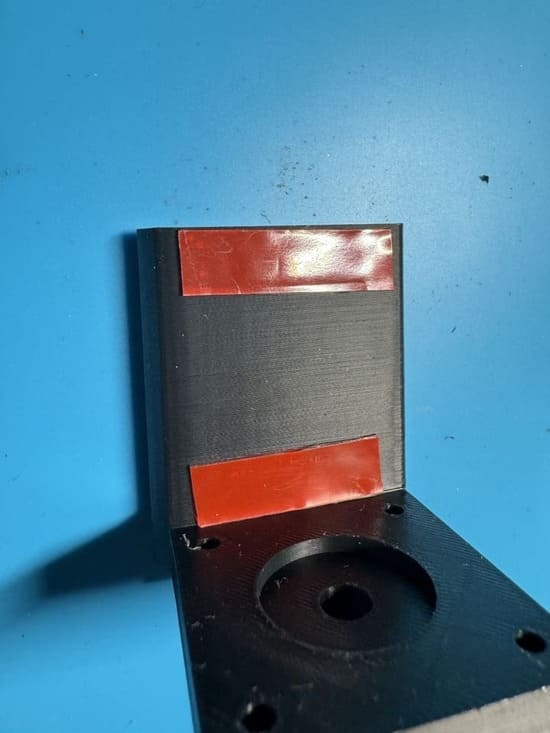
3.用M3x8螺丝把方形锅磁安装到电机架上(注:可先安装电机,锅磁可能会挡着装电机的螺丝)。

4.贴泡胶(起减震、静音作用),安装步进电机,用M3x8螺丝固定,注意电机线路接口与底座缺口同向。
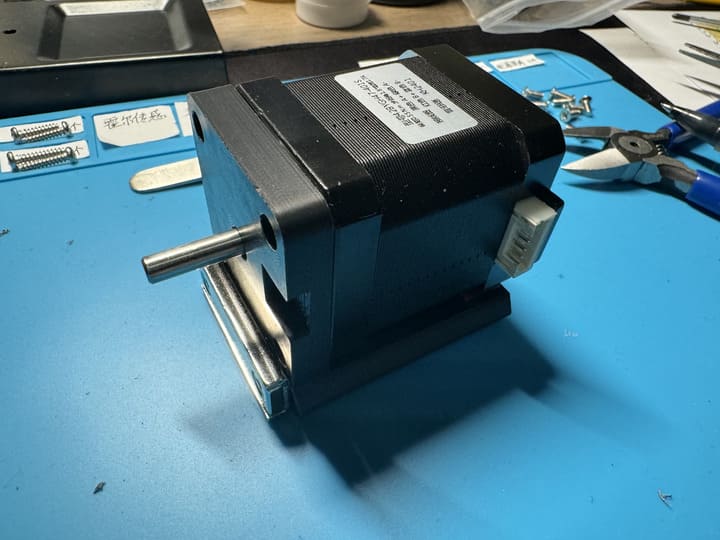
5.将两边的电机插入大底座中,测试是否可以流畅滑动。
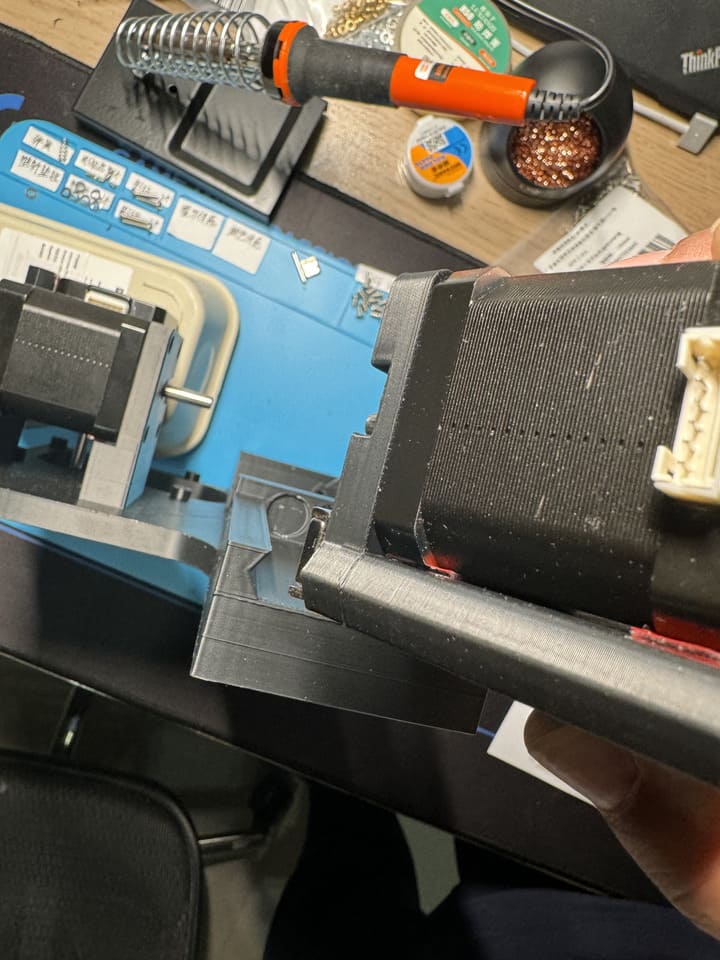

6.用502胶把M3垫片,贴到两个电机槽前端内侧的凹槽中。
7.用M3x6螺丝连接法兰联轴器和大爪子模型。

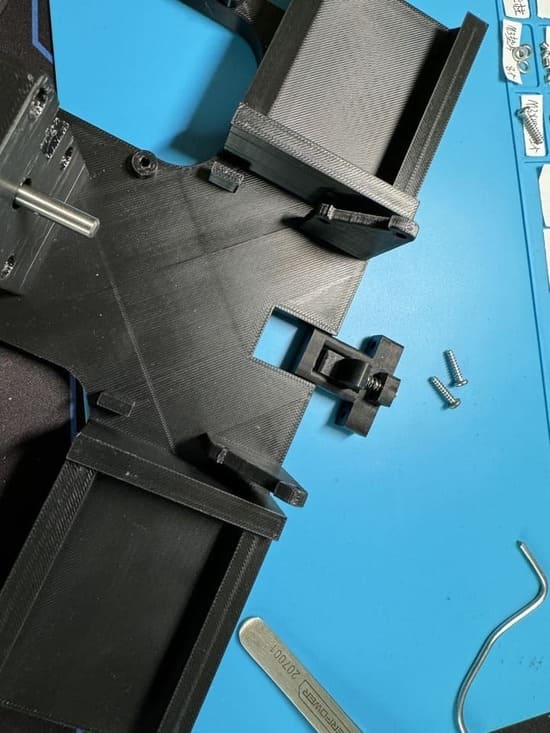
8.棘轮部件2(T型)安装两段0.6mm的软导线(起减震、静音作用),然后截取一段2mm粗、1.5cm长的铁丝当作连接轴,将棘轮部件1(L型)装到棘轮部件2上,最后安装弹簧。如果棘轮部件1孔太小,安装后不能灵活转动,需要先把孔钻大点,我是把不用的铁丝一头压平,压平后宽度大于铁丝直径,做了个简易钻头把孔钻大的。我还在棘轮部件1上钻了一个1mm深的洞用于固定弹簧。



9.将组装好的棘轮部件,用M3x12螺丝固定到大底座上。
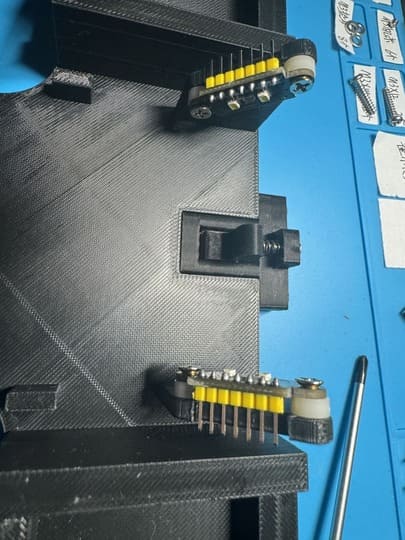
10.颜色传感器焊接排针,用M3x8螺丝和垫柱固定到大底座上,有排阵的一侧在上。

11.三个法兰联轴器装上机米螺丝,先拧松一点,装到电机上后拧紧固定,不用拧太紧,因为后边整机调试的时候还可能会调整。


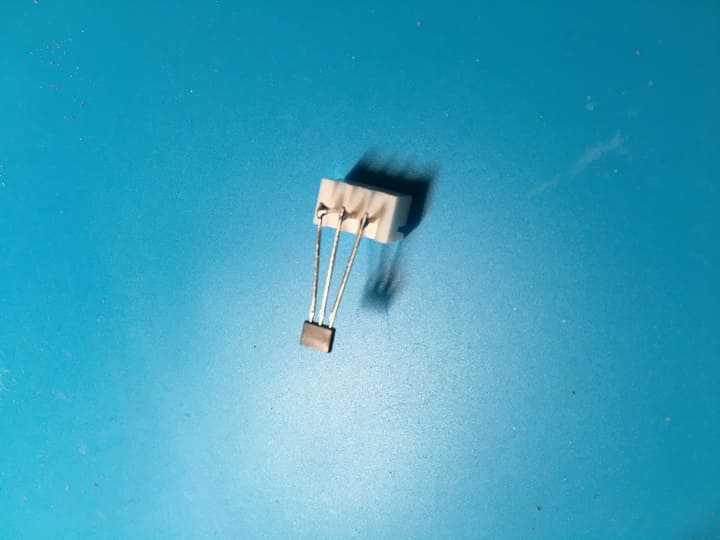
12.霍尔传感器三个引脚涂抹助焊剂,和XH2.54焊接到一起,弯折引脚后用502固定到电机座缺口处。霍尔传感器的磁铁等连接电路板调试完以后再安装。


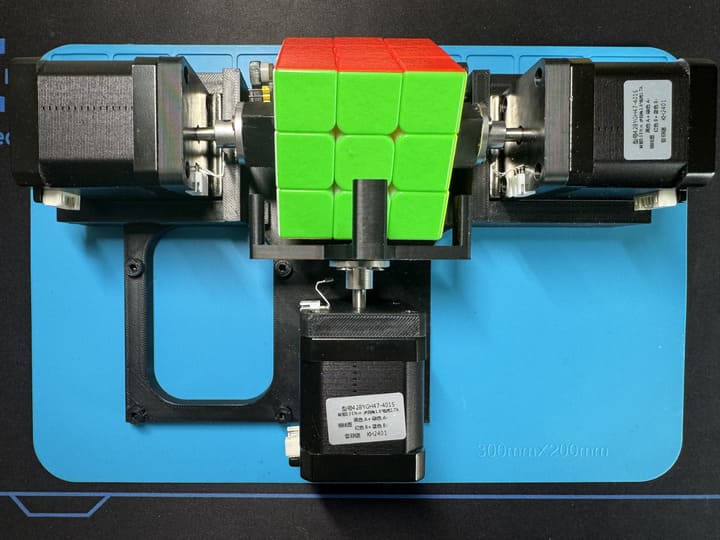
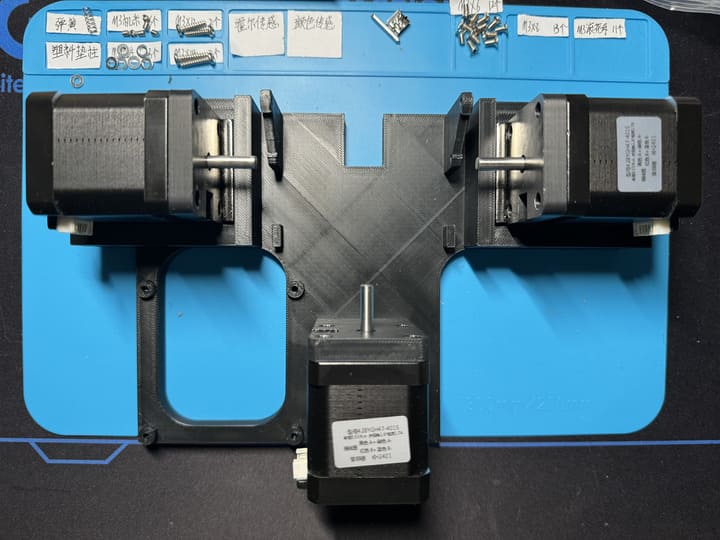
13.机械部分安装完成,效果如下