从零开始制作魔方机器人(三)控制板焊接
贴片元件我是用中温锡浆和热风枪焊接的,PCB焊点涂抹适量锡浆,贴片元件摆到对应位置,热风枪调到400度吹PCB背面,直到锡浆全部融化,元件位置不正拿镊子摆正,虚焊的引脚拿电烙铁补锡。
焊接没问题即可通电测试,需要12V~20V电压和不小于2A电流供电。将电源接入USB1(POWER)口,三个指示灯会微亮,因为还没有烧录程序。用万用表测量霍尔传感器的对地电压应该为5V,U12的对地电压为3.3V,没有问题基本就成功了。
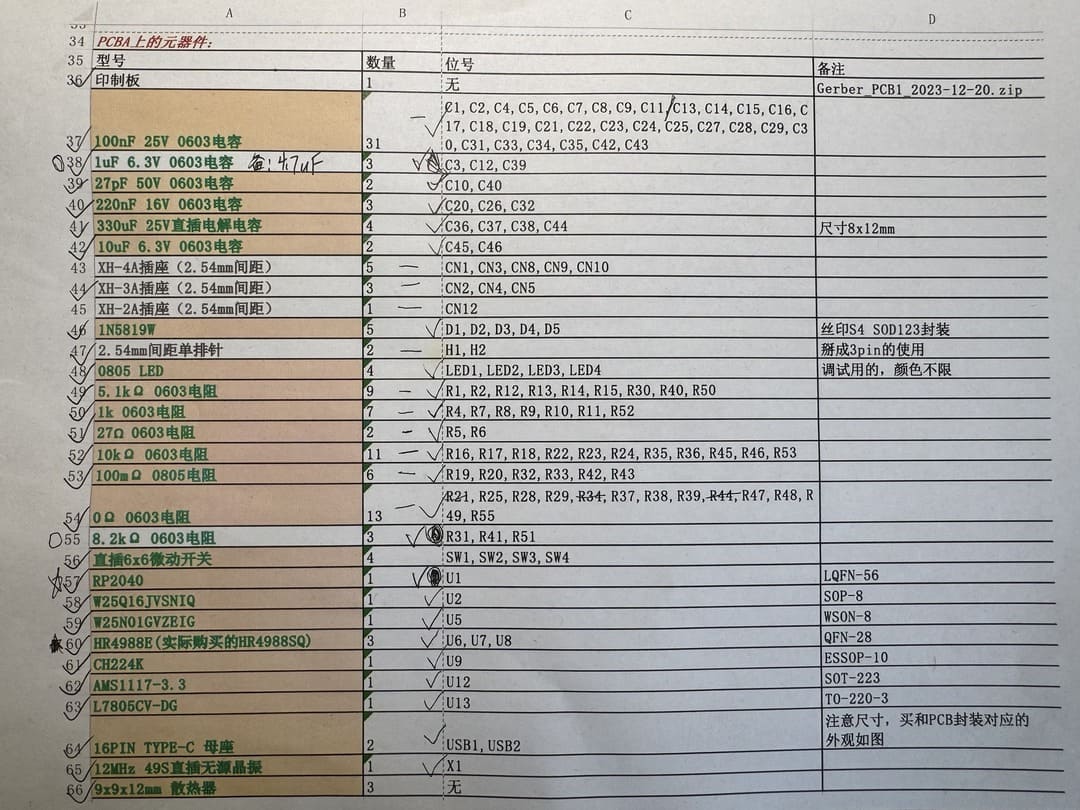
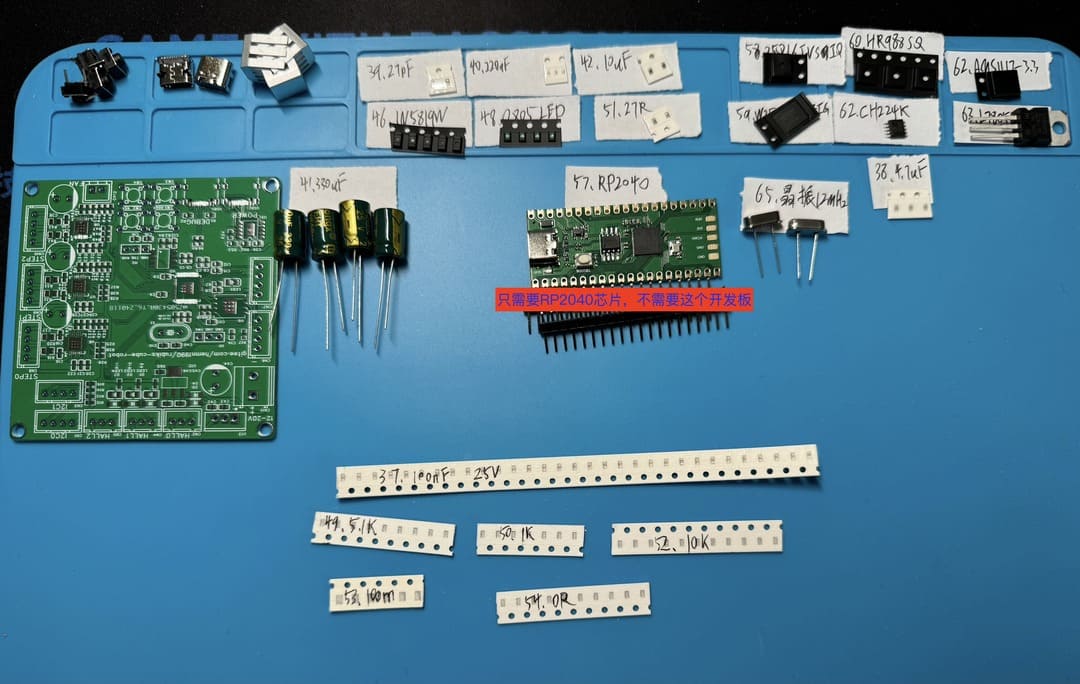
电路板贴片这个过程是最让人心焦的,出现问题完全没思路解决,电路图又不能完全看懂,只能一点一点去学习电路图知识,一点一点琢磨,反复焊接。还有很多时间是用来等快递,那么多元件难免会错买或漏买。控制板所用元件(不全)如下
下面总结了一些我在实操过程中遇到的一些坑:
1.注意元件U1、U5、U6、U7、U8、U9中间是接地引脚,同时起散热作用,别漏焊了。
2.U1芯片焊接应该是这个电路板焊接里最费劲的,新手可参照视频: https://www.bilibili.com/video/BV1Bj411H7EH/
3.这两个电阻我一开始贴错了,无法给RP2040刷固件,排查了好几天没找到问题,还好开源作者在评论里给出了问题排查思路。
连接PC能识别U盘的条件:
- 3.3V和1.1V电正常
- 12M晶振正常
- flash中没有程序
- 复位拉高
- USB的 D+ 和 D- 无虚焊连焊
- 另外供电口和下载调试口不是同一个,下载程序只插入调试口就行
按照这个列表逐个反复排查,终于找到了问题所在,R5、R6两个电阻贴错了。

更多关于RP2040芯片的信息参照: https://pico.org.cn/
4.HR4988的Sense电阻我错用的100兆欧(MΩ),导致通电后电机没反应,更换100毫欧(mΩ)就好了,弄错了单位是小写的m。
如果不确定自己的步进电机是否是好的,可配合这两个工具检测:
步进电机控制器
步进电机驱动器
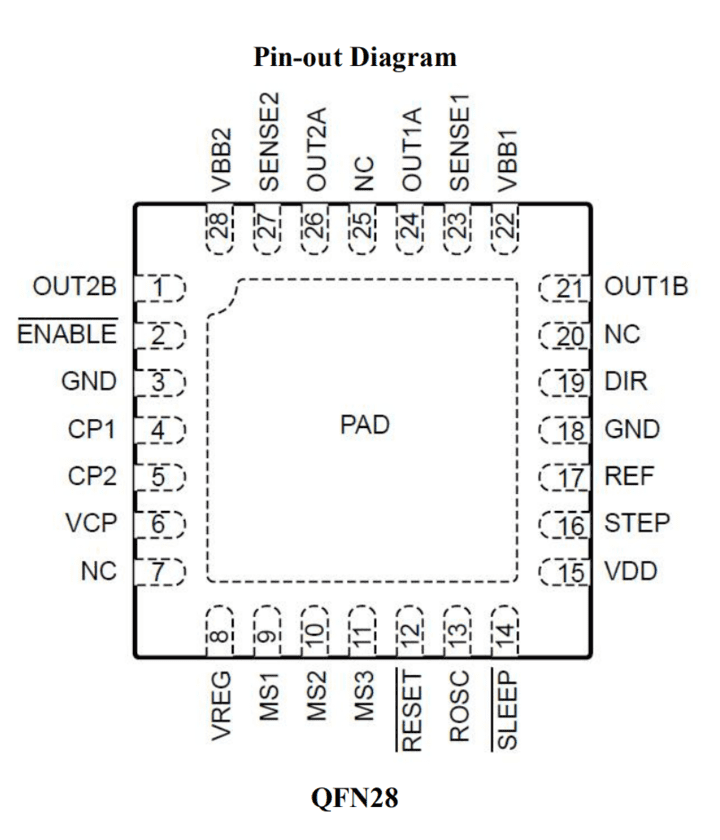
更多关于HR4988芯片的信息参照: https://www.heroic.com.cn/public/uploads/file/20200429/1588135118539087.pdf
如下是HR4988的引脚分布图
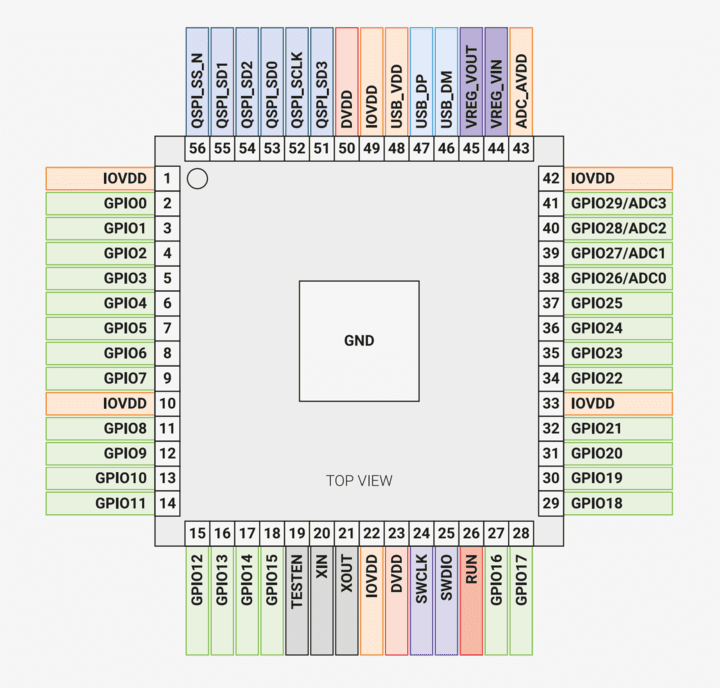
5.按住SW3上电,无法在电脑上看到调试信息,在Windows上折腾了好几天无果,为了排除是环境问题还专门装了Ubuntu系统,还是不行,最后发现RP2040的ADC0、ADC1、ADC2、ADC3四个引脚焊的有点虚,重新焊接RP2040问题解决。所以RP2040焊好后的每个引脚要好好观察,不要虚焊连焊,没有专门的显微镜设备可以用手机的放大镜功能来观察。如下是RP2040的引脚分布图
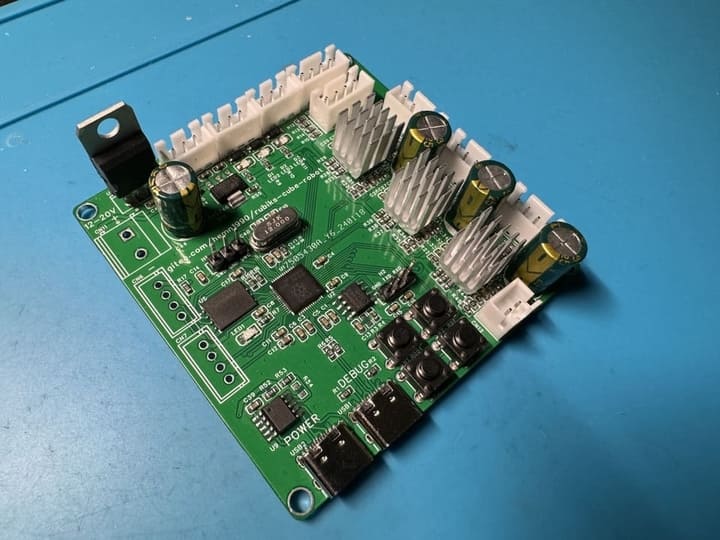
电路板焊接完成的效果如下
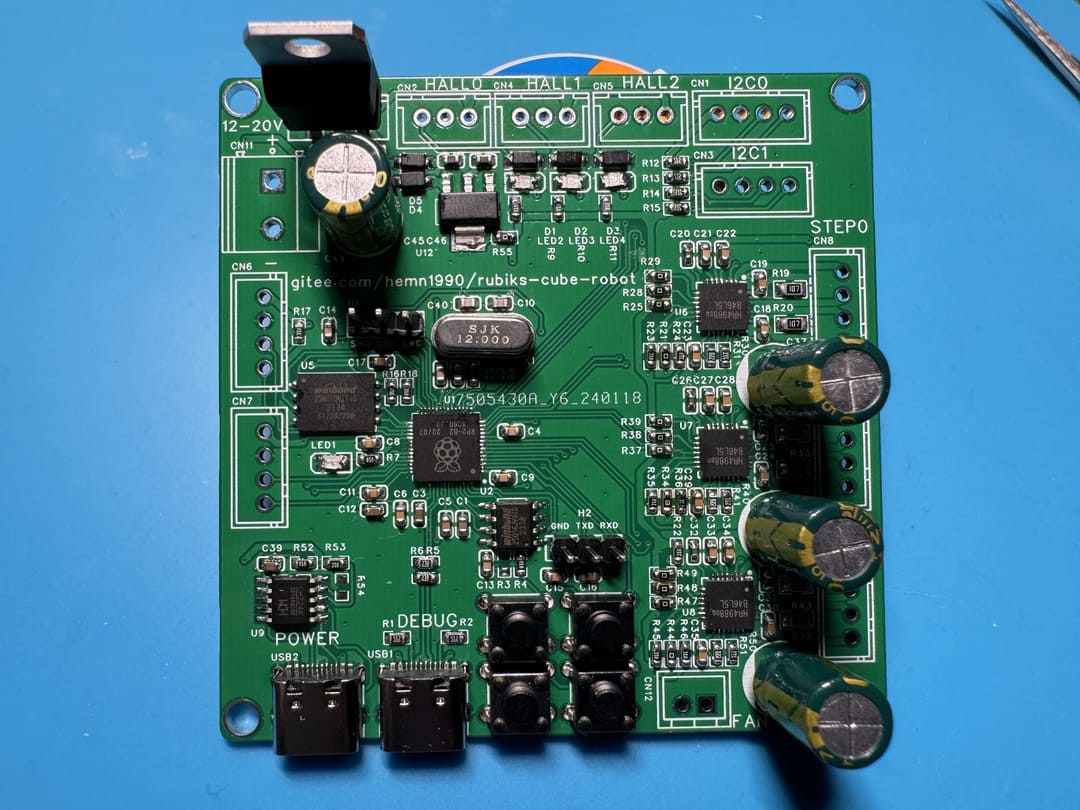
HR4988工作时发热比较厉害,需要安装散热片